


سنسور موقعیت
position sensors
 حسگرهای موقعیت دستگاهی هستند که می توانند حرکت یک جسم را تشخیص دهند یا موقعیت نسبی آن را از یک نقطه مرجع تعیین شده تعیین کنند. از این نوع حسگرها می توان برای تشخیص وجود یا عدم وجود جسم نیز استفاده کرد. انواع مختلفی از سنسورها وجود دارد . حسگرهای حرکتی حرکت یک جسم را تشخیص می دهند و می توانند برای تحریک عمل (مانند روشن کردن نورافکن یا فعال کردن دوربین امنیتی) استفاده شوند. حسگرهای مجاورت نیز می توانند تشخیص دهند که یک شی در محدوده سنسور قرار گرفته است. بنابراین، هر دو سنسور ممکن است به عنوان یک شکل تخصصی از سنسورهای موقعیت در نظر گرفته شوند. اطلاعات بیشتر در مورد این حسگرها را میتوانید در راهنمای مرتبط با سنسورهای مجاورت و سنسورهای نور حرکتی پیدا کنید. یکی از تمایزات سنسورهای موقعیت این است که آنها در بیشتر موارد نه تنها به تشخیص یک جسم بلکه به ثبت موقعیت آن نیز می پردازند و بنابراین شامل استفاده از سیگنال بازخوردی است که حاوی اطلاعات موقعیتی است. در این مقاله اطلاعاتی در مورد انواع مختلف حسگرهای موقعیت، نحوه کار، نحوه استفاده و مشخصات کلیدی مرتبط با این دسته از سنسورها ارائه خواهد شد. برای کسب اطلاعات بیشتر در مورد انواع دیگر حسگرها، به راهنماهای مرتبط ما که انواع مختلف حسگرها و کاربرد آنها یا انواع مختلف حسگرهای اینترنت اشیا (IoT) را پوشش می دهد، مراجعه کنید. برای اهداف این مقاله، اصطلاحات سنسور موقعیت و آشکارساز موقعیت مترادف فرض می شوند.
حسگرهای موقعیت دستگاهی هستند که می توانند حرکت یک جسم را تشخیص دهند یا موقعیت نسبی آن را از یک نقطه مرجع تعیین شده تعیین کنند. از این نوع حسگرها می توان برای تشخیص وجود یا عدم وجود جسم نیز استفاده کرد. انواع مختلفی از سنسورها وجود دارد . حسگرهای حرکتی حرکت یک جسم را تشخیص می دهند و می توانند برای تحریک عمل (مانند روشن کردن نورافکن یا فعال کردن دوربین امنیتی) استفاده شوند. حسگرهای مجاورت نیز می توانند تشخیص دهند که یک شی در محدوده سنسور قرار گرفته است. بنابراین، هر دو سنسور ممکن است به عنوان یک شکل تخصصی از سنسورهای موقعیت در نظر گرفته شوند. اطلاعات بیشتر در مورد این حسگرها را میتوانید در راهنمای مرتبط با سنسورهای مجاورت و سنسورهای نور حرکتی پیدا کنید. یکی از تمایزات سنسورهای موقعیت این است که آنها در بیشتر موارد نه تنها به تشخیص یک جسم بلکه به ثبت موقعیت آن نیز می پردازند و بنابراین شامل استفاده از سیگنال بازخوردی است که حاوی اطلاعات موقعیتی است. در این مقاله اطلاعاتی در مورد انواع مختلف حسگرهای موقعیت، نحوه کار، نحوه استفاده و مشخصات کلیدی مرتبط با این دسته از سنسورها ارائه خواهد شد. برای کسب اطلاعات بیشتر در مورد انواع دیگر حسگرها، به راهنماهای مرتبط ما که انواع مختلف حسگرها و کاربرد آنها یا انواع مختلف حسگرهای اینترنت اشیا (IoT) را پوشش می دهد، مراجعه کنید. برای اهداف این مقاله، اصطلاحات سنسور موقعیت و آشکارساز موقعیت مترادف فرض می شوند.

انواع سنسور موقعیت
هدف کلی یک سنسور موقعیت، شناسایی یک شیء و انتقال موقعیت آن از طریق تولید یک سیگنال است که بازخورد موقعیتی فراهم میکند. این بازخورد سپس میتواند برای کنترل واکنشهای خودکار در یک فرآیند، فعالسازی اعلانها یا ایجاد فعالیتهای دیگر مطابق با برنامه خاص مورد استفاده قرار گیرد. به طور کلی، سنسورهای موقعیت میتوانند به سه دسته عمده تقسیم شوند که شامل سنسورهای خطی، سنسورهای چرخشی و سنسورهای زاویهای هستند. چندین تکنولوژی خاص میتواند برای دستیابی به این نتیجه مورد استفاده قرار گیرد و انواع مختلف سنسورهای موقعیت این تکنولوژیهای پایهای را منعکس میکنند.
انواع اصلی سنسورهای موقعیت عبارتند از:
- سنسورهای موقعیت پتانسیومتری (بر اساس مقاومت)
- سنسورهای موقعیت القائی
- سنسورهای موقعیت بر اساس جریان ادی
- سنسورهای موقعیت خازنی
- سنسورهای موقعیت مگنتواستریکتیو
- سنسورهای موقعیت مبتنی بر اثر هال
- سنسورهای موقعیت فیبرنوری
- سنسورهای موقعیت اپتیکی
- سنسورهای موقعیت التراسونیک
سنسورهای موقعیت القائی
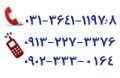
سنسورهای موقعیت القائی موقعیت یک شیء را با تغییرات در ویژگیهای یک میدان مغناطیسی که در حلقههای سنسور ایجاد میشود، تشخیص میدهند. یک نوع این سنسور به نام LVDT یا ترانسفورماتور خطی متغیر دیفرانسیل است. در یک سنسور موقعیت LVDT، سه حلقه جداگانه روی یک لوله خالی پیچیده میشوند. یکی از اینها یک حلقه اصلی است و دو حلقه دیگر حلقههای ثانویه هستند. آنها الکتریکی به صورت سری با یکدیگر وصل شدهاند، اما رابطه فاز حلقههای ثانویه به طور 180 درجه از فاز حلقه اصلی خارج است. یک هسته یا آرمچر فرامغناطیسی داخل لوله خالی قرار داده شده و آرمچر به شیء اتصال داده شده که موقعیت آن در حال اندازهگیری است. یک سیگنال ولتاژ هیجانانگیز به حلقه اصلی اعمال میشود که باعث ایجاد یک نیروی الکتروموتوری در حلقههای ثانویه LVDT میشود. با اندازهگیری تفاوت ولتاژ بین دو حلقه ثانویه، میتوان موقعیت نسبی آرمچر (و بنابراین شیء متصل به آن) را تعیین کرد. وقتی که آرمچر دقیقاً در وسط لوله قرار دارد، نیروهای الکتروموتوری خارج میشوند و نتیجه ولتاژی به دست نمیآید. اما هنگامی که آرمچر از موقعیت مرکزی (صفر) حرکت میکند، ولتاژ و قطبیت آن تغییر میکند. بنابراین، امپلیتود ولتاژ به همراه زاویه فاز، اطلاعاتی را فراهم میکند که نه تنها مقدار حرکت از مرکز (صفر) بلکه جهت آن را نیز نشان میدهد. شکل ۱ زیر عملکرد یک ترانسفورماتور خطی متغیر دیفرانسیل را نشان میدهد، که نحوه ترجمه اندازهگیری ولتاژ به نشانهای از موقعیت را نشان میدهد.
این نوع سنسورهای موقعیت، دقت، وضوح خوب، حساسیت بالایی دارند و خطی بودن خوبی را در محدوده حسگر ارائه می دهند. آنها همچنین بدون اصطکاک هستند و می توانند برای استفاده در شرایطی که ممکن است در معرض عناصر قرار گیرند آب بندی شوند. در حالی که LVDT ها برای ردیابی حرکت خطی عمل می کنند، یک دستگاه معادل به نام RVDT (برای ترانسفورماتور دیفرانسیل ولتاژ چرخشی) می تواند موقعیت چرخشی یک جسم را ردیابی کند. عملکرد RVDT یکسان با LVDT است و فقط در مشخصات ساخت آنها متفاوت است.
سنسورهای موقعیت بر اساس جریان ادی
جریانهای ادی، جریانهای الکتریکی هستند که در یک ماده هادی به وجود میآیند وقتی که در حضور یک میدان مغناطیسی متغیر قرار میگیرند و نتیجه قانون اندازهگیری فارادی هستند. این جریانها در حلقههای بسته جریان مییابند و منجر به ایجاد یک میدان مغناطیسی ثانویه میشوند.
اگر یک حلقه با جریان متناوب تحریک شود تا یک میدان مغناطیسی اصلی ایجاد کند، حضور یک ماده هادی در نزدیکی حلقه میتواند به دلیل تعامل میدان ثانویه ایجاد شده توسط جریانهای ادی، که بر امپدانس حلقه اثر میگذارد، احساس شود. بنابراین، تغییر در امپدانس حلقه میتواند برای تعیین فاصله شیء از حلقه استفاده شود.
سنسورهای موقعیت بر اساس جریانهای ادی با اشیاء هادی الکتریکی کار میکنند. بیشتر سنسورهای جریان ادی به عنوان سنسورهای نزدیکی عمل میکنند، طراحی شدهاند تا تعیین کنند که یک شیء به موقعیت سنسور نزدیک شده است. آنها به عنوان سنسورهای موقعیت محدود هستند زیرا بر اساس همهجهتی هستند، به این معنی که میتوانند فاصله نسبی شیء از سنسور را مشخص کنند اما جهت شیء نسبت به سنسور را نه.
حسگرهای موقعیت خازنی
حسگرهای موقعیت خازنی بر تشخیص تغییر در مقدار ظرفیت برای تعیین موقعیت جسم مورد اندازه گیری تکیه دارند. خازن ها از دو صفحه جدا شده از یکدیگر تشکیل شده اند که در بین صفحات یک ماده دی الکتریک وجود دارد. دو روش کلی وجود دارد که برای تشخیص موقعیت یک جسم با استفاده از حسگر موقعیت خازنی استفاده می شود:
1. با تغییر ثابت دیالکتریک خازن
2. با تغییر مساحت همپوشانی صفحات خازن
در حالت اول، جسم مورد اندازه گیری به آن متصل می شود. ماده دی الکتریک که موقعیت آن نسبت به صفحات خازن با حرکت جسم تغییر می کند. همانطور که ماده دی الکتریک جابجا می شود، ثابت دی الکتریک موثر خازن تغییر می کند که حاصل ناحیه جزئی ماده دی الکتریک است و تعادل ثابت دی الکتریک هوا است. این رویکرد یک تغییر خطی در مقدار ظرفیت با توجه به موقعیت نسبی جسم ارائه می دهد. در حالت دوم، به جای اتصال جسم به ماده دی الکتریک، به یکی از صفحات خازن متصل می شود. بنابراین، هنگامی که جسم موقعیت خود را جابجا می کند، ناحیه همپوشانی صفحات خازن تغییر می کند که دوباره مقدار خازن را تغییر می دهد. اصل تغییر ظرفیت برای اندازه گیری موقعیت یک جسم را می توان برای حرکت در هر دو جهت خطی و زاویه ای اعمال کرد.
حسگرهای موقعیت مغناطیسی
مواد فرومغناطیسی مانند آهن، نیکل و کبالت دارای خاصیتی هستند که به عنوان محدودیت مغناطیسی شناخته می شود، به این معنی که این ماده در حضور میدان مغناطیسی اعمال شده، اندازه یا شکل خود را تغییر می دهد. یک سنسور موقعیت مغناطیسی محدود کننده از این اصل برای تعیین موقعیت یک جسم استفاده می کند.
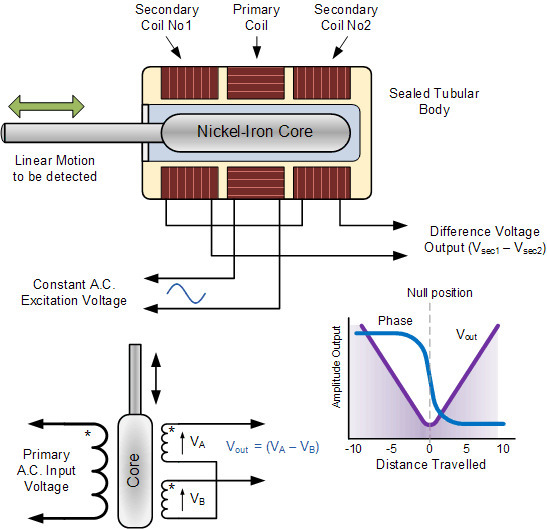
یک آهنربای موقعیت متحرک به جسم مورد اندازه گیری متصل است. یک موجبر که از سیمی تشکیل شده است که از طریق آن یک پالس جریان منتقل می شود، به سنسوری که در انتهای موجبر قرار دارد متصل می شود. آهنربای موقعیت یک میدان مغناطیسی محوری ایجاد می کند، میدانی که خطوط میدان آن نسبت به سیم مغناطیسی محدود کننده و موجبر همسطح هستند. هنگامی که یک پالس جریان به سمت موجبر فرستاده می شود، یک میدان مغناطیسی در سیم ایجاد می شود که با میدان مغناطیسی محوری آهنربای دائمی (آهنربای موقعیت) تعامل دارد. نتیجه تعامل میدانی یک پیچش است که به عنوان اثر ویدمان شناخته می شود.
این پیچش باعث ایجاد فشار در سیم می شود که یک پالس صوتی ایجاد می کند که در امتداد موجبر حرکت می کند و توسط سنسور در انتهای موجبر شناسایی می شود. با اندازهگیری زمان سپری شده بین شروع پالس جریان و تشخیص پالس صوتی، حسگر موقعیت مغناطیسی میتواند مکان نسبی مغناطیس موقعیت را تعیین کند. از آنجایی که موج صوتی از محلی که مغناطیس موقعیت قرار دارد در دو جهت حرکت می کند (هم به سمت سنسور پیکاپ و هم دور از آن)، یک دستگاه میرایی در انتهای مخالف موجبر قرار دارد تا پالس را جذب کند. سنسور به طوری که باعث نشود سیگنال تداخلی به سمت سنسور پیکاپ منعکس شود. شکل 2 زیر تصویری از اصل عملکرد یک سنسور موقعیت مغناطیسی محدود کننده را ارائه می دهد.
حسگرهای موقعیت مغناطیسی محدود کننده با ماهیت خود برای تشخیص موقعیت خطی استفاده می شوند. آنها را می توان به آهنرباهای موقعیت چندگانه برای ارائه اطلاعات موقعیتی در چندین جزء در امتداد یک محور مجهز کرد. آنها حسگرهای غیر تماسی هستند و از آنجایی که موجبر معمولاً در یک لوله فولادی ضد زنگ یا آلومینیومی قرار می گیرد، این حسگرها را می توان در کاربردهایی استفاده کرد که می توانند بالقوه برای آلودگی باشند. علاوه بر این، سنسورهای موقعیت مغناطیسی محدود کننده می توانند حتی اگر مانعی بین موجبر و مغناطیس موقعیت وجود داشته باشد، به شرطی که مانع از یک ماده غیر مغناطیسی ساخته شده باشد، عمل کنند.
سنسورها با خروجیهای مختلفی از جمله ولتاژ DC، جریان، سیگنال PWM و پالسهای دیجیتال start-stop در دسترس هستند.
سنسورهای موقعیت مغناطیسی مبتنی بر اثر هال
اثر هال بیان می کند که وقتی یک هادی الکتریکی مسطح نازک جریانی از آن می گذرد و در یک میدان مغناطیسی قرار می گیرد، میدان مغناطیسی بر حامل های بار تأثیر می گذارد و آنها را مجبور می کند در یک طرف رسانا جمع شوند. نسبت به دیگری، برای متعادل کردن تداخل میدان مغناطیسی. این توزیع نابرابر بارهای الکتریکی منجر به ایجاد اختلاف پتانسیل بین دو طرف هادی می شود که به ولتاژ هال معروف است. این پتانسیل الکتریکی در جهتی اتفاق میافتد که عرضی نسبت به جهت جریان الکتریکی و جهت میدان مغناطیسی است. اگر جریان در هادی به مقدار ثابتی نگه داشته شود، بزرگی ولتاژ هال مستقیماً قدرت میدان مغناطیسی را منعکس می کند.
در سنسور موقعیت اثر هال، جسم مورد اندازه گیری برای موقعیت خود به آهنربایی متصل می شود که در شفت سنسور قرار دارد. با حرکت جسم، موقعیت آهنربا نسبت به عنصر هال در حسگر تغییر می کند. این حرکت موقعیت سپس قدرت میدان مغناطیسی اعمال شده به عنصر هال را تغییر می دهد که به نوبه خود به عنوان تغییر در ولتاژ هال اندازه گیری شده منعکس می شود. به این ترتیب، ولتاژ هال اندازه گیری شده نشانگر موقعیت جسم می شود.
سنسورهای موقعیت فیبر نوری
سنسورهای موقعیت فیبر نوری از یک فیبر نوری با مجموعه ای از آشکارسازهای نوری در هر انتهای فیبر استفاده می کنند. یک منبع نور به جسمی که حرکت آن مشاهده می شود متصل است. انرژی نوری که در موقعیت جسم به داخل فیبر فلورسنت هدایت میشود، در فیبر منعکس میشود و به دو انتهای فیبر فرستاده میشود، جایی که توسط ردیابهای نوری شناسایی میشود. لگاریتم نسبت توان نوری اندازهگیری شده همانطور که در دو آشکارساز نوری مشاهده میشود، تابعی خطی از فاصله جسم از انتهای فیبر خواهد بود و بنابراین میتوان از این مقدار برای ارائه اطلاعات موقعیتی روی جسم استفاده کرد.
سنسورهای موقعیت نوری
سنسورهای موقعیت نوری با استفاده از یکی از دو اصل عمل می کنند. در نوع اول، نور از یک امیتر یا فرستنده منتقل می شود و به گیرنده ای در انتهای دیگر سنسور ارسال می شود. در نوع دوم، سیگنال نور ساطع شده از جسم تحت نظارت منعکس می شود و به سمت منبع نور باز می گردد. تغییر در ویژگی های نور (به عنوان مثال طول موج، شدت، فاز، قطبش) برای ایجاد اطلاعات در مورد موقعیت جسم استفاده می شود. این نوع سنسورها به سه دسته تقسیم میشوند:
.1 انکودرهای اپتیکی انتقالی
2. انکودرهای اپتیکی بازتابی
3. انکودرهای اپتیکی انتقالی
سنسورهای موقعیت اپتیکی مبتنی بر انکودر برای حرکت هر دو خطی و چرخشی در دسترس هستند.ستند.
سنسورهای موقعیت اولتراسونیک
مشابه سنسورهای موقعیت نوری ، سنسورهای موقعیت اولتراسونیک امواج صوتی با فرکانس بالا را ارسال میکنند که معمولاً از یک ترانسدیوسر بلور پیزوالکتریک تولید میشود. امواج اولتراسونیک تولید شده از ترانسدیوسر از شیء مورد اندازهگیری یا هدف بازتاب میشوند و به ترانسدیوسر باز میگردند جایی که یک سیگنال خروجی ایجاد میشود. سنسورهای اولتراسونیک میتوانند به عنوان سنسورهای مجاورتی عمل کنند، جایی که گزارش میدهند که یک شیء در محدوده مشخصی از سنسور است، یا به عنوان سنسور موقعیت که اطلاعات فاصلهای فراهم میکند. مزایای سنسورهای موقعیت اولتراسونیک این است که میتوانند با اشیاء هدف با مواد و ویژگیهای سطح مختلف کار کنند و میتوانند اشیاء کوچک را در فواصل بزرگتر از سایر انواع سنسورهای موقعیت شناسایی کنند. آنها همچنین مقاوم در برابر لرزش، نویز محیطی، تداخل الکترومغناطیسی (EMI) و تابش مادونقرمز هستند.
مشخصات سنسور موقعیت
پارامترهای خاصی که عملکرد یک سنسور موقعیت را تعریف میکنند، بسته به نوع سنسور انتخاب شده متغیر خواهد بود زیرا اصول فناوری پایه از نوعی به نوعی تغییر میکنند. برخی از مشخصات کلیدی که باید به آنها توجه شود و برای بیشتر سنسورهای موقعیت صدق میکنند عبارتند از:
1. دامنه اندازهگیری – نشاندهنده محدوده فاصله از سنسور است که برای آن میتوان مقدار اندازهگیری شده را دریافت کرد.
2. رزولوشن – ارزش کمترین افزایش موقعیتی است که سنسور میتواند اندازه بگیرد.
3. دقت – اندازهگیری از درجه تطابق موقعیت اندازهگیری شده با موقعیت واقعی شیء اندازهگیری شده است.
4. تکرارپذیری – بازتاب محدودهای از مقادیر حاصل شده برای موقعیت اندازهگیری شده هنگامی که سنسور در طول زمان یک اندازهگیری مشابه انجام میدهد.
5. خطیبودن – انحراف از رفتار خطی سیگنال خروجی اندازهگیری شده در طول محدوده خروجی برای سنسور.
6. سایر ملاحظات انتخاب برای سنسورهای موقعیت شامل:
- اندازه و وزن سنسور
- اینکه سنسور اطلاعات موقعیت به صورت مطلق یا تدریجی فراهم میکند
- محدوده دمای عملکری دستگاه
- قابلیت سنسور برای مقاومت در برابر شرایط محیطی و عملیاتی دیگر، مانند وجود ترقق، آلودگی یا شوک و لرزش مکانیکی
- سهولت نصب
- هزینه اولیه
نمونههای کاربردهای سنسورهای موقعیت
سنسورهای موقعیت در بسیاری از فرآیندهای اتوماسیونی به کار میروند و قلب بسیاری از فرآیندهای اتوماتیک است. یکی از مثالهای شناخته شده، ماشین لباسشویی اتوماتیک است. سنسورهای موقعیت برای اندازهگیری موقعیت خودرو هنگام عبور از ماشین لباسشویی استفاده میشوند. این امکان را فراهم میکند تا تجهیزات تمیزکاری در زمان مناسب فعال شود. برای تمیزکاری لاستیکها، لازم است بدانیم کجا هستند و زمانی که در موقعیت صحیح برای اعمال مواد شستشو یا محافظ لاستیک هستند. با توجه به اینکه اندازه خودروها متفاوت است، سنسورهای موقعیت برای شروع و پایان فرآیند تمیزکاری نیازمند افزایش یا کاهش سیگنال هستند تا ماشین لباسشویی بتواند به اندازهگیری و تمیزکاری خودروهای مختلف تنظیم شود و همچنان موثر باشد.
سنسورهای موقعیت همچنین برای کنترل تجهیزات استفاده میشوند. سنسورهای القایی که حلقههای بزرگی از سیم در جاده دارند و برای شناسایی حضور خودروها در یک خط ترن خاص استفاده میشوند تا سیستم کنترل ترافیک به فعالسازی چراغ ترافیک بپردازد. پارکینگهایی که دارای سیستمهای کنترل دسترسی هستند، از سنسورهای موقعیت برای باز کردن دروازهها هنگام نزدیک شدن خودروها استفاده میکنند. آسانسورها از سنسورهای موقعیت برای تشخیص اینکه آسانسور به درستی در یک طبقه خاص قرار گرفته است و دربهای آسانسور ایمن برای باز شدن هستند، استفاده میکنند.
فرآیندهای صنعتی در خطوط تولید اتوماتیک از سنسورهای موقعیت برای اطمینان از اینکه محصولات به درستی قبل از انجام یک مرحله فرآیند خودکار قرار گرفتهاند، مانند اسپری رنگ بر روی بدنه اتومبیل یا افزودن آب به یک بطری آب، استفاده میکنند. امکانات پزشکی اسکنرهای MRI دارای سنسورهای موقعیت هستند که برای اطمینان از اینکه مکانگذاری بیمار قبل از شروع اسکن یا تصویربرداری صحیح استفاده میشود و برای حرکت دادن بیمار از طریق ماشین MRI استفاده میشود.
طراحان و مهندسان خودرو از سنسورهای موقعیت برای اندازهگیری پارامترهای مهم موتور، مانند موقعیت شافت و گاز و ..و
دوربینهای امنیتی که دارای قابلیت اسکن و تیلت هستند، از سنسورهای موقعیت برای تعیین جهت نسبی دوربین استفاده میکنند تا اطمینان حاصل شود که به درستی جهتگیری شدهاند و مناسبترین دید را فراهم کردهاند.
- محصولات پر طرفدار






ترمومتر لیزری آلمانی با ترموکوپل خارجی K ابزار 1725

کنترلر سطح/ لول سوئیچ پره ای مواد جامد و پودری مدل 1872





ترمومتر صنعتی دو لیزر ابزار1727






رکوردر دما 12 کانال ترموکوپل ابزار 1189






